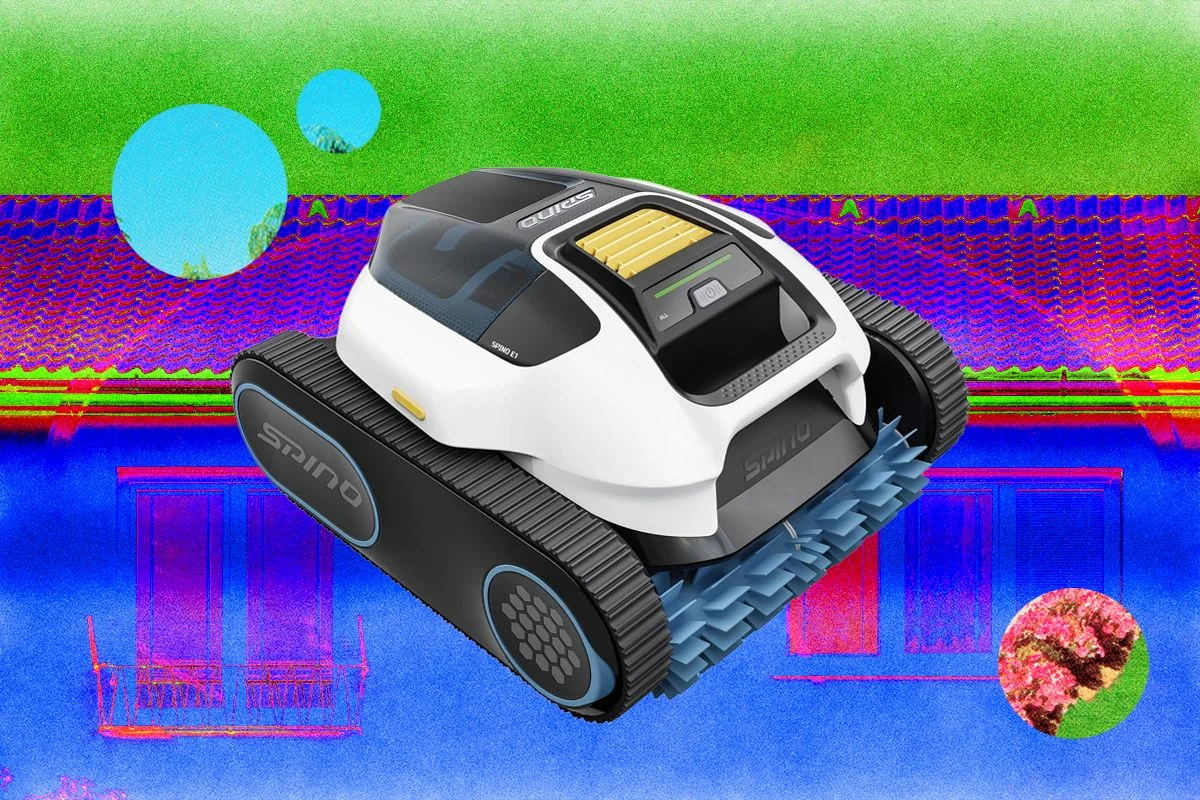
The emergence of robotic pool cleaners has transformed the landscape of residential aquatic maintenance, shifting the burden of labor from homeowners to autonomous systems. Among the latest entries into this competitive market is the Mammotion Spino E1, a device developed by a company previously recognized for its innovations in robotic lawn care. As the smart home ecosystem continues to expand into outdoor environments, the Spino E1 represents an attempt to bridge the gap between high-tech connectivity and rugged, underwater utility. However, a detailed evaluation of the device reveals a complex interplay between sophisticated hardware intentions and a software infrastructure that remains in a developmental phase.
Technical Specifications and Connectivity Framework
The Mammotion Spino E1 utilizes a dual-layered connectivity suite designed to facilitate both local control and remote updates. For immediate interaction, the robot employs Bluetooth technology to communicate with a user’s smartphone. This allows for proximity-based adjustments and initial configuration. For more substantial data transfers, the unit utilizes 2.4-GHz Wi-Fi, which connects directly to the home network. This Wi-Fi capability is specifically reserved for over-the-air (OTA) firmware updates rather than real-time remote management, a distinction that is common in underwater robotics due to the significant signal attenuation caused by water.
The onboarding process requires the user to connect to a temporary ad-hoc network generated by the device before bridging it to the local home network. While this multi-step setup is standard for many IoT (Internet of Things) devices, it remains a critical hurdle for less tech-savvy consumers. Testing indicates that while the initial handshake between the device and the network is generally seamless, the subsequent maintenance of the software environment is less streamlined. Mammotion does not currently utilize a "push" notification system for firmware updates. Instead, users must proactively navigate to the Device Information menu within the proprietary app to check for available software patches. Furthermore, early reports suggest that the installation process for these updates can be inconsistent, often requiring multiple attempts before a successful installation is confirmed.
Software Interface and User Experience
The Spino E1 is managed through a dedicated mobile application that, in its current iteration, offers a functional but limited set of tools. Users can choose from four standard operating modes, which dictate the cleaning pattern and duration. Beyond these presets, the app allows for the configuration of the robot’s maximum travel speed and provides access to several features currently labeled as being in "beta" status.
The inclusion of beta features in a consumer-ready product is a growing trend in the tech industry, though it often signals a product that is still undergoing refinement in the field. One such feature is "Turbo Cleaning," which is designed to increase suction power. Another beta option focuses on improving the efficiency of cleaning steps and raised platforms within the pool. The logic behind keeping these features optional—rather than integrating them into the core operational logic of the machine—remains a point of contention among product analysts. For instance, the improved step-cleaning algorithm would seemingly be beneficial for all users, yet it must be manually toggled within the settings menu.

Performance Analysis: Debris Collection and Filtration
In practical field tests, the Spino E1 has demonstrated consistent, if somewhat underwhelming, results in debris collection. When tasked with removing synthetic leaves—a standard benchmark for robotic cleaners—the unit averaged a cleanup rate of approximately 80 percent. This leaves a 20 percent margin of residual material, which is often found scattered across the pool floor rather than being concentrated in difficult-to-reach corners. This suggests that the issue may not be the robot’s navigation or coverage pathing, but rather the raw suction power or the design of the intake mechanism.
The performance degrades further when the robot encounters smaller particulate matter, such as organic dirt or sand. Observations from test cycles indicate that instead of effectively vacuuming these smaller particles into the internal debris basket, the Spino E1 occasionally smears the material across the pool floor. This phenomenon is often a symptom of an underpowered motor or a filtration system that lacks the necessary micron rating to trap fine silt. While the robot handles flat surfaces and raised platforms with relative ease, it struggles significantly with obstacles located at the waterline, often failing to navigate around skimmers or tile ledges effectively.
The Turbo Mode Paradox
One of the more curious findings in the evaluation of the Spino E1 involves the aforementioned "Turbo Cleaning" mode. When activated, this mode provides a visible increase in cleaning efficacy, addressing some of the suction issues noted during standard operation. Surprisingly, initial testing suggests that this increased power draw does not have a proportional impact on the device’s battery life.
The primary drawback of the Turbo Mode is its lack of persistence. In the current software version, the mode must be manually re-activated through the smartphone app before every cleaning cycle. If the user fails to do so, the robot reverts to its standard, less effective power setting. Industry experts suggest that if Mammotion can stabilize this feature, making it the default setting would significantly improve the product’s value proposition and performance ratings.
Navigation and the Retrieval Challenge
Robotic pool cleaners are generally judged on two phases of operation: the cleaning cycle and the retrieval process. The Spino E1 features a wall-climbing capability that allows it to ascend to the waterline upon the completion of its task. This is intended to make it easier for the owner to remove the device from the water without having to fish it off the bottom of the pool.
However, the execution of this feature is hampered by a lack of communication and limited power reserves. The Mammotion app does not currently send a push notification to alert the user when a cycle has finished. Because the robot must continuously run its propulsion jets to remain buoyant at the waterline, it consumes its remaining battery life rapidly. Users typically have a window of approximately 10 minutes to retrieve the robot before the battery dies, at which point the unit sinks back to the pool floor. To mitigate this, Mammotion includes a hook in the box that can be attached to a standard pool pole, but the necessity of this tool highlights a significant gap in the "smart" functionality of the device.

Market Context and Broader Implications
The robotic pool cleaner market is currently valued at several billion dollars globally, with a projected compound annual growth rate (CAGR) of over 10 percent through 2030. Competitors such as Maytronics (Dolphin), Polaris, and newer entrants like Aiper have set high standards for autonomous navigation and debris filtration. Mammotion’s entry into this space with the Spino E1 follows the company’s success with the Luba series of robotic lawnmowers, which were praised for their GPS-based perimeter mapping.
The transition from land to water, however, presents unique engineering challenges. The Spino E1’s reliance on Bluetooth and 2.4-GHz Wi-Fi reflects the industry’s struggle to maintain connectivity in an environment where radio waves are easily absorbed. The lack of real-time management via Wi-Fi is a common limitation, but the failure to provide timely notifications for retrieval is a missed opportunity for Mammotion to differentiate itself through superior user experience (UX) design.
Future Outlook and Recommendations
For the Mammotion Spino E1 to become a top-tier contender in the pool maintenance market, several key areas require attention. First, the software ecosystem must be matured. Transitioning beta features like Turbo Cleaning and improved step-cleaning into the standard operating firmware would immediately enhance the device’s utility. Furthermore, implementing a robust notification system to alert users when the robot is ready for retrieval would solve one of the most significant pain points identified in early testing.
On the hardware side, future iterations may need to address the suction deficiencies. While an 80 percent cleanup rate for large debris may be acceptable for some, the "smearing" of fine particulates suggests a need for a more powerful motor or a more sophisticated brush-and-vacuum assembly.
In conclusion, the Mammotion Spino E1 is a device of significant potential that is currently held back by its software limitations and a few critical design choices. It offers a glimpse into a future where pool maintenance is entirely hands-off, but for now, it remains a tool that requires a fair amount of human intervention and oversight. As Mammotion continues to iterate on its firmware, the Spino E1 may yet evolve into the high-performance cleaner its hardware specs suggest it could be. For the moment, it serves as a reminder that in the world of smart home technology, the "smart" component is just as vital as the "robot" component.