The intersection of age-old craft and cutting-edge robotics has found a profound expression in Hikarigami, a groundbreaking project developed by a team of visionary students at the Harvard Graduate School of Design (GSD). Annie Xing, Luke Fiorante, Joseph Fujinami, and Chi Zhang have meticulously investigated the fundamental logic of manual making, pushing the boundaries to explore how robotic modalities can replicate and even augment distinctly human gestures. The project, named Hikarigami—a portmanteau derived from the Japanese words ‘hikari’ (light) and ‘kirigami’ (the intricate art of cutting and folding a single sheet into three-dimensional forms)—stands as a testament to the seamless integration of digital code and physical force, redefining contemporary design and manufacturing paradigms.
The Genesis of Hikarigami: Bridging Ancient Craft and Future Tech

Since the dawn of human civilization, the power of craft has been an indelible force shaping every facet of design, from rudimentary tools to sophisticated architectural marvels. The ‘human touch’ has long been synonymous with bespoke quality, intricate detail, and a certain artisanal romance. However, in an era increasingly dominated by automation, the question arises: can the nuanced intelligence embedded in centuries of handcraft be translated into the language of machines? Hikarigami directly addresses this query by leveraging the conceptual framework of kirigami, an ancient Japanese art form that predates origami, emphasizing cuts as much as folds to create complex, volumetric structures from flat sheets. This traditional art, which embodies precision, material understanding, and spatial imagination, provided the conceptual bedrock for the team’s exploration into robotic fabrication.
The Harvard GSD, renowned globally for its pioneering research in architecture, urban planning, and landscape architecture, serves as an ideal incubator for such interdisciplinary projects. The school consistently encourages its students to challenge conventional wisdom and explore novel approaches to design and construction, often through the integration of advanced technologies. Projects like Hikarigami exemplify the GSD’s commitment to pushing the boundaries of what is possible, fostering a research environment where theoretical inquiry meets practical application. The project, initiated as part of advanced design studios or research seminars focused on robotic fabrication and computational design, likely began with extensive literature reviews on both kirigami’s structural principles and the capabilities of industrial robots in material manipulation.
Computational Design and Robotic Precision

The journey of Hikarigami from concept to tangible luminaire is a sophisticated dance between computational design and robotic precision. The process commences with a flat sheet of aluminum, chosen for its ductility, light weight, and aesthetic potential. This sheet undergoes an initial transformation through laser cutting, guided by a variable lattice pattern. This pattern is not arbitrarily chosen; it is the result of intricate computational simulations that predict how the material will behave under stress and deformation. Algorithms, likely developed using platforms such as Grasshopper within Rhinoceros 3D, are employed to generate complex geometric motifs. These simulations consider factors like material thickness, desired light refraction, structural integrity, and the aesthetic interplay of light and shadow. The resulting lattice is unique; while each motif follows a continuous logical progression, no two are identical. This variability in density and geometry is crucial, as it dictates how the aluminum will subsequently bend, resist, and ultimately refract light, contributing to the luminaire’s dynamic visual character.
Following the precise laser cutting, the flat aluminum sheet embarks on its three-dimensional evolution through robotic incremental forming. This highly specialized technique represents a significant departure from traditional manufacturing methods, which often rely on expensive and rigid molds or conventional tooling. Instead, an industrial robotic arm—specifically, an ABB industrial model—is programmed with custom toolpath scripts to meticulously press into the metal sheet, point by point, with sub-millimeter precision. This process, known as single-point incremental forming (SPIF), is a staple in advanced manufacturing sectors like aerospace and automotive industries, where high-strength, lightweight components with complex geometries are required. The Harvard GSD team, however, recontextualized SPIF from a production tool into a powerful instrument for design exploration.
The robotic arm’s movements are deliberate, yet responsive. Each deformation, while precisely calculated by the computational model, also interacts with the inherent properties of the aluminum, leading to subtle variations. These minute differences are not manufacturing defects but rather integral elements of the design, ensuring that every panel, and consequently every projection of light, possesses its own distinct character. The absence of molds not only reduces manufacturing costs and material waste but also opens up unprecedented possibilities for customization and iterative design, where each iteration can be a unique artifact rather than a mass-produced replica.

The Material Transformation: From Planar Sheet to Luminous Sculpture
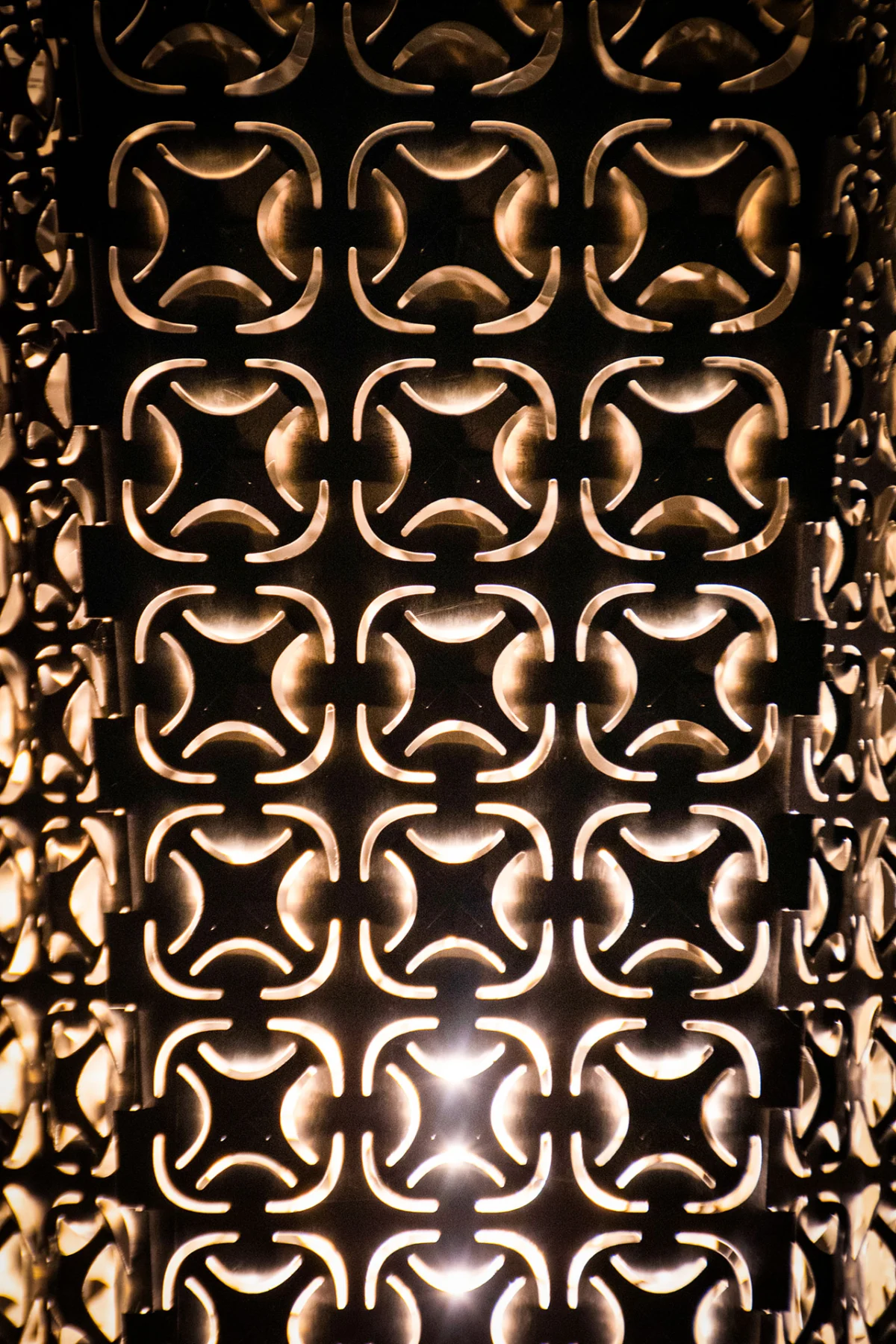
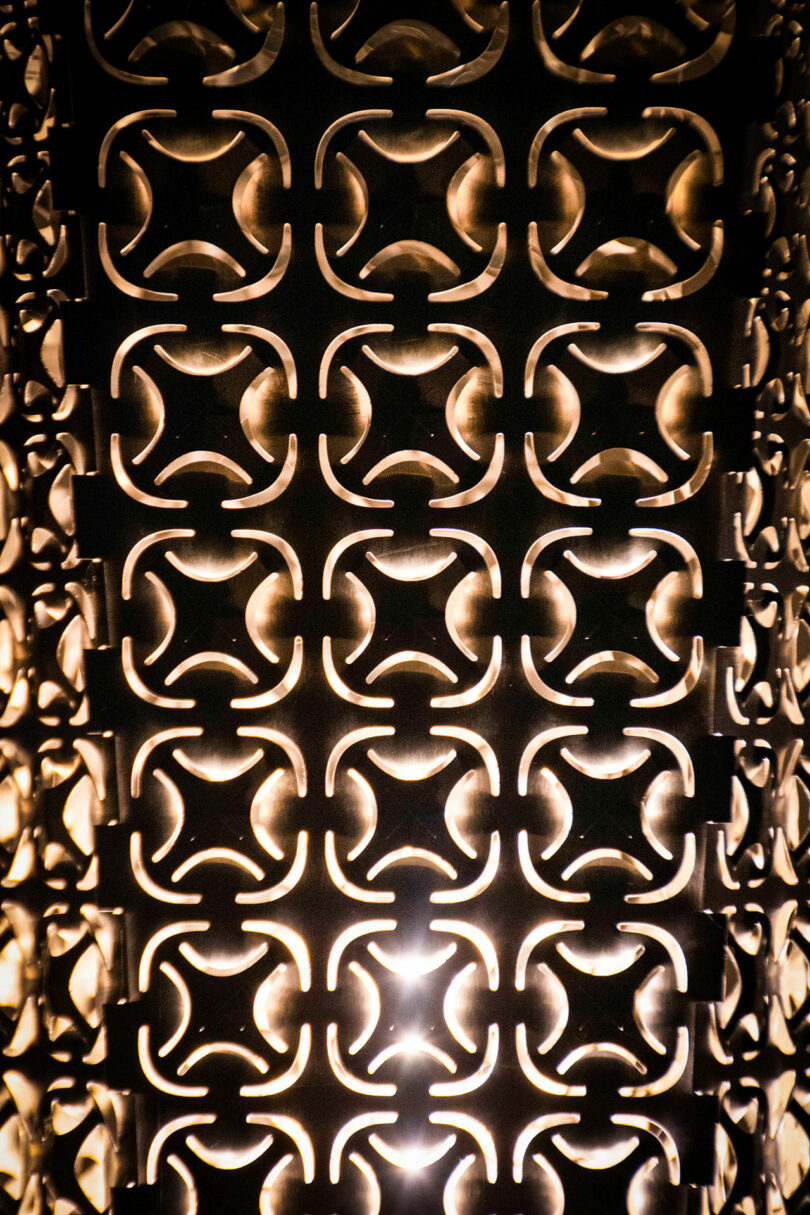
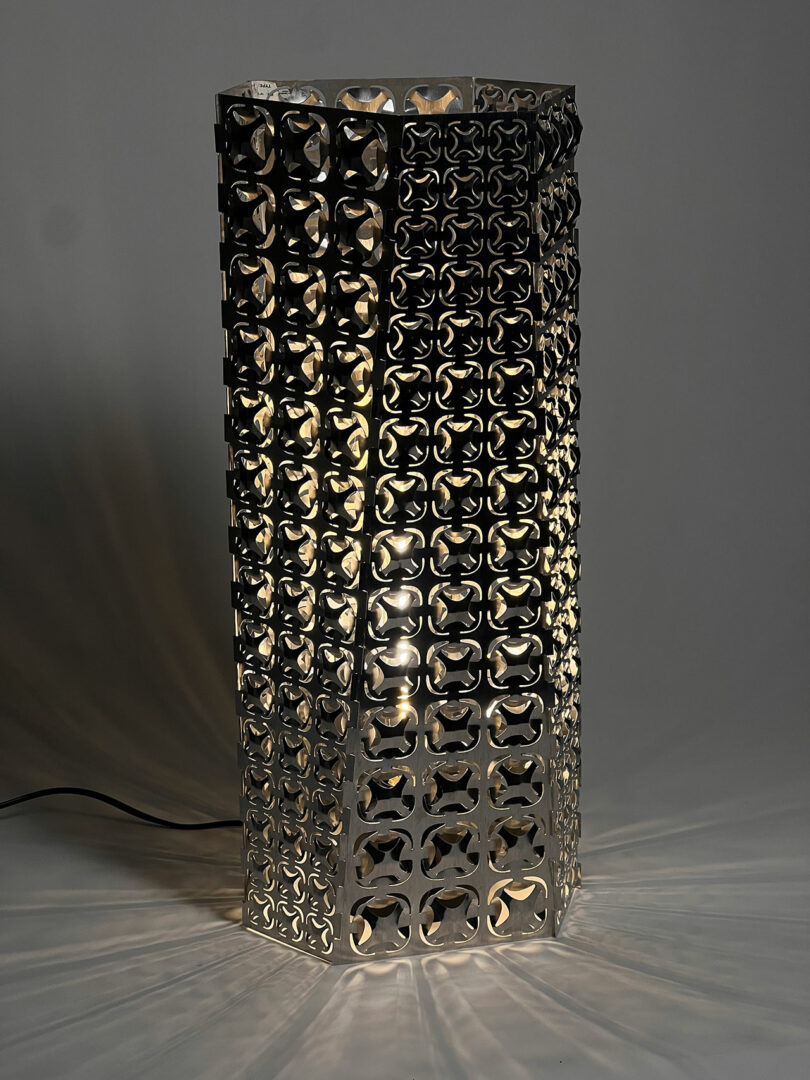
The ultimate form of the Hikarigami luminaire is a volumetric sculpture composed of six intricately formed panels. These panels, initially flat aluminum sheets, are meticulously shaped without the need for traditional tooling, demonstrating a remarkable efficiency in material transformation. The choice of aluminum is strategic, offering both structural integrity and a receptive surface for light interaction. As the robotic arm incrementally deforms the laser-cut sheets, the two-dimensional patterns are translated into three-dimensional reliefs, creating a porous, light-refracting surface.
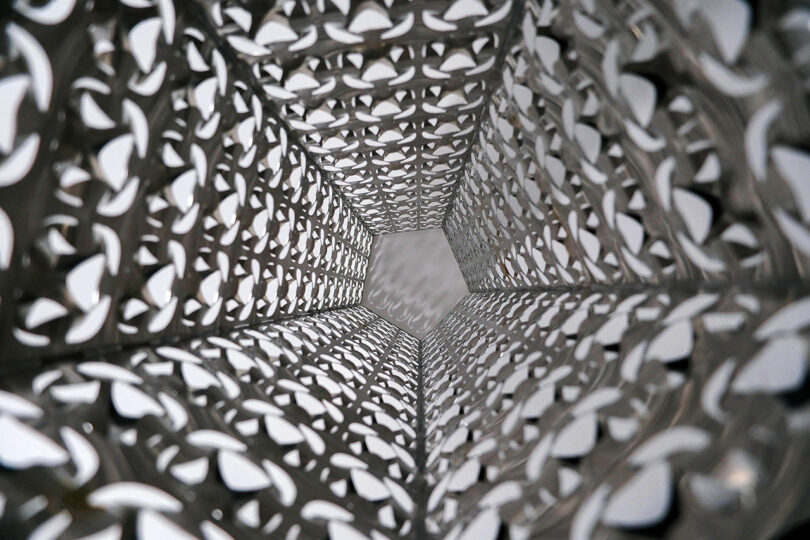
This transformation is a function of both process and progress. The computational design dictates the overall form and the specific characteristics of the lattice, while the robotic fabrication precisely executes these instructions, translating digital intent into physical reality. The result is a structure where form, texture, and illumination emerge simultaneously from a single, integrated act of making. The varying density and geometry of the lattice patterns play a critical role in how the light interacts with the surface. Areas with denser patterns might diffuse light more broadly, while sparser sections could allow for sharper, more defined projections. This intelligent integration of material properties, geometric design, and fabrication technique results in a luminaire that transcends mere functionality to become an interactive piece of art.

A New Aesthetic and Experiential Paradigm
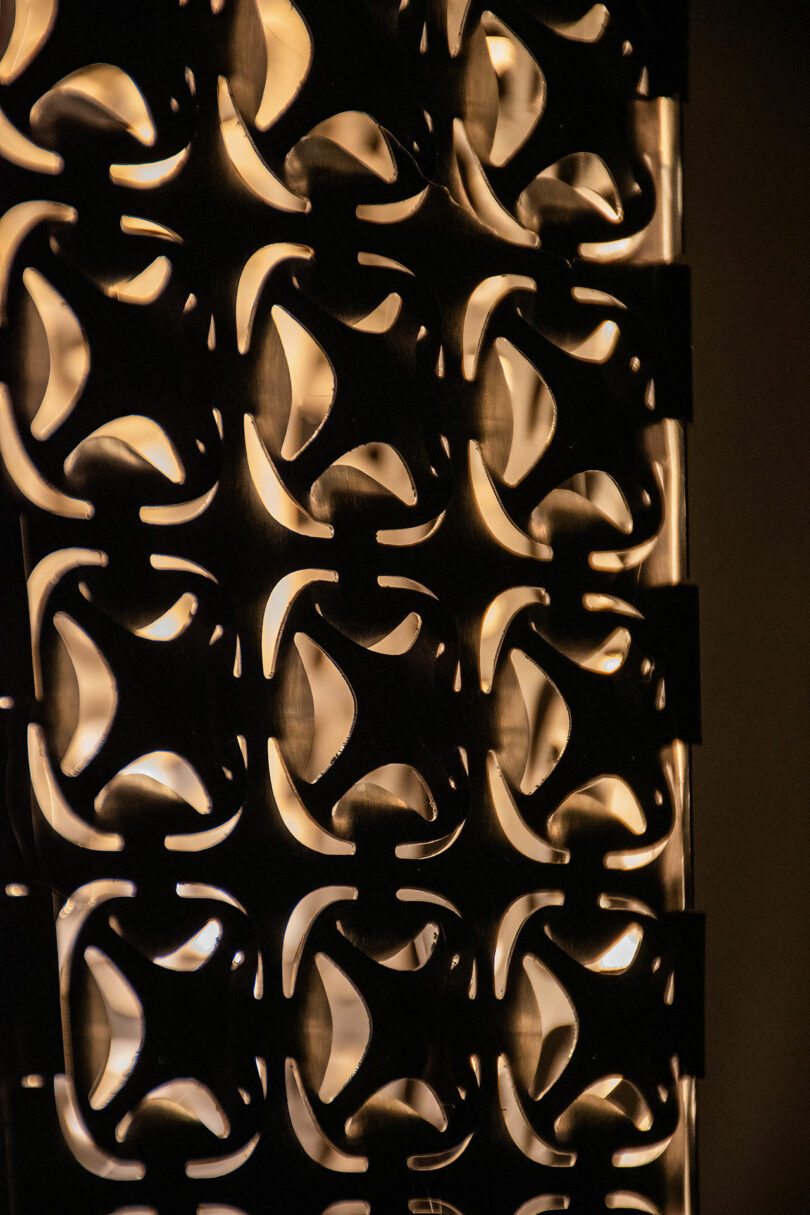
When illuminated, the Hikarigami luminaire reveals its true magic. The six formed panels act synergistically as both diffusers and lenses, casting complex caustic light patterns that dance across walls and floors. Unlike static lighting fixtures, Hikarigami offers an experience that is neither singular nor unchanging. Its projections evolve with movement, angle, and proximity, transforming the ambient space. At times, the intricate patterns might dissolve into a soft, atmospheric glow, creating a sense of tranquility and depth. At other moments, the light reveals a dense, almost textile-like surface language, emphasizing the intricate details of the aluminum’s form.
This dynamic interplay of light and shadow creates an immersive environment, inviting viewers to engage with the object on multiple sensory levels. The shifting patterns foster a sense of discovery and wonder, transforming ordinary spaces into extraordinary visual landscapes. This experiential dimension is a core achievement of the Hikarigami project, showcasing how advanced fabrication can contribute to new aesthetic possibilities that were previously unattainable through conventional means. The luminaire doesn’t just illuminate a space; it actively sculpts it with light, creating an ever-changing narrative.
The Unfinished Narrative: Marks of Process and Patina
Beyond its immediate visual impact, Hikarigami possesses a deeper, more enduring narrative. The raw, unfinished aluminum surfaces bear the subtle marks of their own creation: minute irregularities, directional grain patterns, and residual tensions left by the robotic tool. These are not imperfections to be concealed but rather a visible record of the fabrication process, imbuing the object with a unique "romantic narrative of making." In an age of mass production where objects often arrive in a pristine, anonymous state, Hikarigami celebrates its genesis, inviting observers to appreciate the journey from raw material to finished form.
Furthermore, the choice of raw aluminum ensures that the material will continue to evolve over time. Exposed to the environment and the subtle effects of human interaction, the surface will gradually develop a unique patina, a natural consequence of oxidation and exposure. This inherent quality of change ensures that Hikarigami remains a living object, its aesthetic deepening and transforming with age, accumulating a history that is distinctly its own. This aspect aligns with a growing movement in design that values material honesty and the beauty of natural aging, contrasting with the often-ephemeral nature of contemporary products.
Implications for Design and Manufacturing
The Hikarigami project, completed in 2025, delineates a new paradigm of manufacture, one where craft and automation are not opposing forces but synergistic collaborators. Its implications extend far beyond the realm of decorative lighting, touching upon industrial design, architectural fabrication, and the very definition of modern craftsmanship.
- Reimagining Craft in the Digital Age: Hikarigami demonstrates that robotic fabrication can move beyond mere replication of human tasks to actively interpret and extend the principles of craft. It suggests a future where machines, guided by human designers, can imbue objects with a level of detail and variability that rivals, and in some cases surpasses, manual production. This challenges the notion that craft is solely the domain of the human hand, proposing a hybrid model where the designer’s vision is amplified by robotic precision.
- Sustainable Manufacturing: By eliminating the need for expensive and resource-intensive molds, single-point incremental forming, as showcased by Hikarigami, offers a more sustainable approach to manufacturing. This reduction in tooling, coupled with the ability to produce highly customized designs on demand, minimizes waste and resource consumption, aligning with broader goals for environmentally conscious design.
- Architectural Fabrication: The principles demonstrated in Hikarigami—transforming flat sheets into complex, light-interacting surfaces—have significant potential for architectural applications. Imagine building facades that dynamically respond to sunlight, interior partitions that cast intricate patterns, or structural elements that combine aesthetic beauty with high performance, all fabricated with robotic precision from raw materials.
- Democratization of Complex Forms: Advanced computational tools and robotic fabrication techniques, once exclusive to large industries, are becoming increasingly accessible. Projects like Hikarigami showcase how these technologies can be utilized in academic settings to explore complex geometries and material behaviors, potentially democratizing the creation of intricate, bespoke designs for a wider range of applications.
- The Evolving Role of the Designer: In this new paradigm, the designer’s role shifts from merely sketching forms to orchestrating complex digital and physical processes. Designers become more akin to conductors, developing algorithms, programming robots, and understanding the intricate interplay between digital models and material realities. This demands a new skill set, blending artistic vision with technical proficiency in computation and engineering.
The Harvard GSD Context: A Hub for Innovation
The Harvard Graduate School of Design has long been at the forefront of exploring emerging technologies and their impact on the built environment. Its faculty and students are continually engaged in pioneering research that redefines architectural practice, urban design, and landscape architecture. Hikarigami is a prime example of the GSD’s commitment to interdisciplinary innovation, bringing together expertise in computational design, material science, and robotic engineering. The school’s extensive fabrication labs, equipped with state-of-the-art robotic arms, laser cutters, and other digital manufacturing tools, provide an unparalleled environment for students to experiment and push the boundaries of design and production. This project not only showcases the individual talents of the student team but also highlights the institutional support and intellectual environment that nurtures such forward-thinking endeavors.
The Team Behind the Innovation
The successful realization of Hikarigami is a testament to the collaborative spirit and diverse expertise of its core team:
- Annie Xing: Directed the intricate computational design, responsible for developing the algorithms and simulations that generated the unique lattice patterns and guided the material deformation. Her work was foundational in translating the conceptual vision into a digitally executable plan.
- Luke Fiorante: Specialized in robotic fabrication and toolpath programming. His expertise was critical in translating the computational designs into precise instructions for the ABB industrial robot, ensuring sub-millimeter accuracy in the incremental forming process. Further details on the project are available at lukefiorante.com.
- Joseph Fujinami: Led the hands-on fabrication and structural assembly, ensuring that the robotically formed panels were meticulously brought together to create the cohesive and robust luminaire. His understanding of material behavior and construction techniques was vital.
- Chi Zhang: Contributed significantly to the robotic fabrication aspects, working alongside Luke Fiorante to optimize the robotic processes and troubleshoot technical challenges encountered during the iterative prototyping phase.
This collaborative structure, where each member brought a specialized skill set to the table, underscores the complex, multi-faceted nature of cutting-edge design and manufacturing projects in contemporary academic and professional contexts.
Looking Ahead: The Future of Human-Robot Collaboration
Hikarigami is more than just a luminaire; it is a prototype for a future where the warmth and complexity of human craft can be amplified and explored through the precision and efficiency of robotic systems. It challenges the traditional dichotomy between handmade and machine-made, proposing a synthesis where both contribute to a richer, more nuanced design language. The project’s legacy will likely resonate in future research and applications, inspiring designers and engineers to further investigate the vast potential of human-robot collaboration in creating objects and spaces that are not only functional but also deeply experiential and aesthetically compelling. As technology continues to advance, projects like Hikarigami will undoubtedly serve as crucial benchmarks, guiding the evolution of design, manufacturing, and our understanding of the built environment in the 21st century.

Photography for Hikarigami was collaboratively captured by Annie Xing, Luke Fiorante, Joseph Fujinami, and Chi Zhang, further illustrating the team’s comprehensive engagement with every aspect of the project.